
Precision Pollination Robot
The objective for this project is to design a prototype pollinator robot, named BrambleBee, and perform proof-of-concept demonstrations of its effectiveness for brambles (i.e. blackberry and raspberry) pollination in a greenhouse environment. During the project, we developed the ability to precisely locate, evaluate, interact, and manipulate small and delicate plant structures within unstructured, low-dynamic, and GPS-challenged environments, which is an enabling technology for supporting future integrated crop management systems.
My jobs in this project:
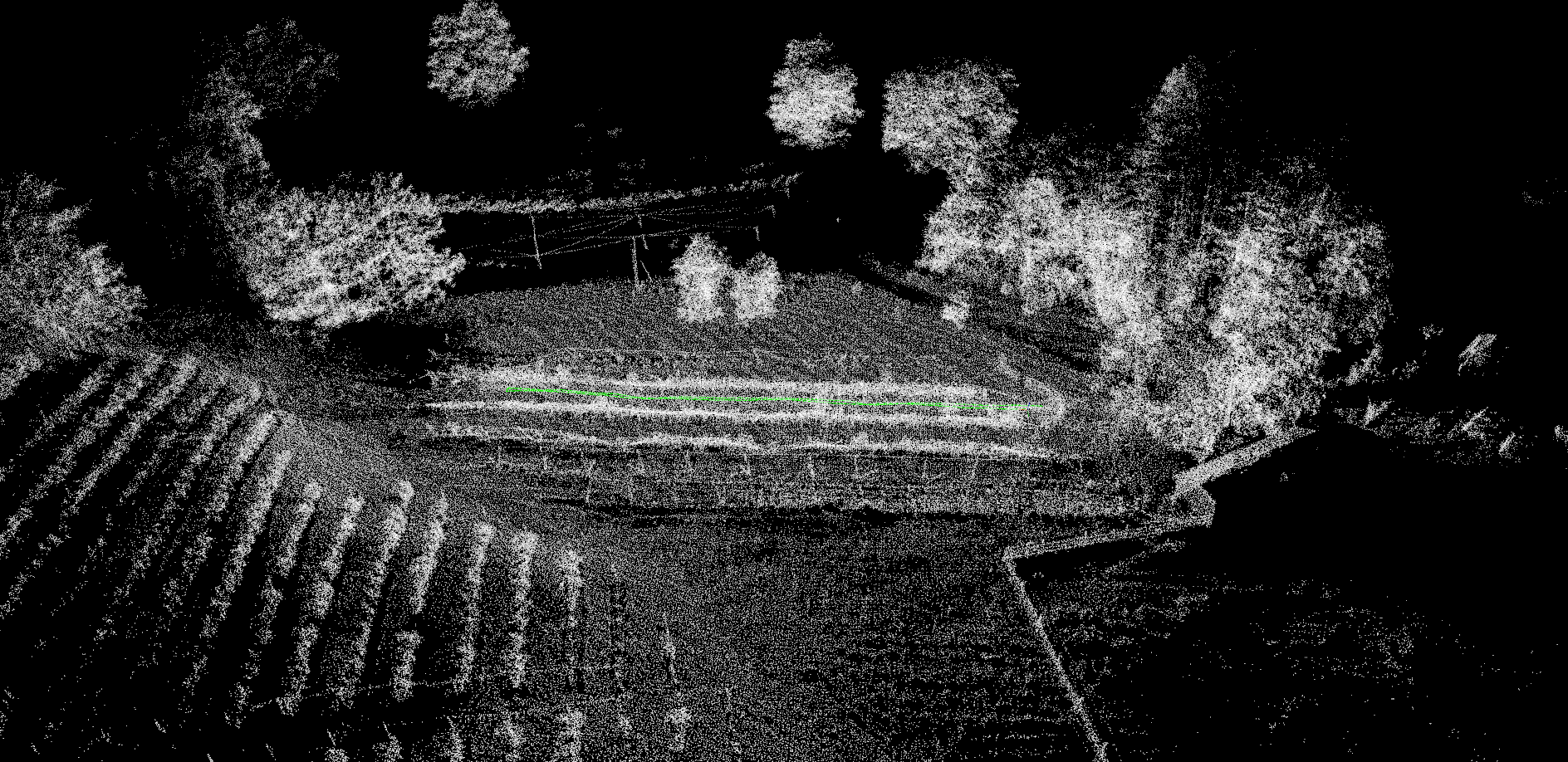
Designed and developed the localization system for the pollinator robot, BrambleBee. The system is able to provide low-drift and high update rate (i.e., 50 Hz) pose estimates and to update the map of the environment. The system utilize three primary information sources: 3D point cloud scans provided by the LiDAR, the acceleration and angular velocity measurements provide by the IMU and the velocity measured by wheel odometry.
Related papers:
Yang, Chizhao, Ryan Watson, Jason Gross, Yu Gu, “Localization Algorithm Design and Evaluation for an Autonomous Pollination Robot,” Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), pp. 2702-2710, 2019.
Strader, Jared, Jennifer Nguyen, Chizhao Yang et al. “Flower Interaction Subsystem for a Precision Pollination Robot.” In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 5534-5541. IEEE, 2019.
Ohi, Nicholas, Kyle Lassak, Chizhao Yang et al. “Design of an autonomous precision pollination robot.” In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 7711-7718. IEEE, 2018.
Image:
Videos:

